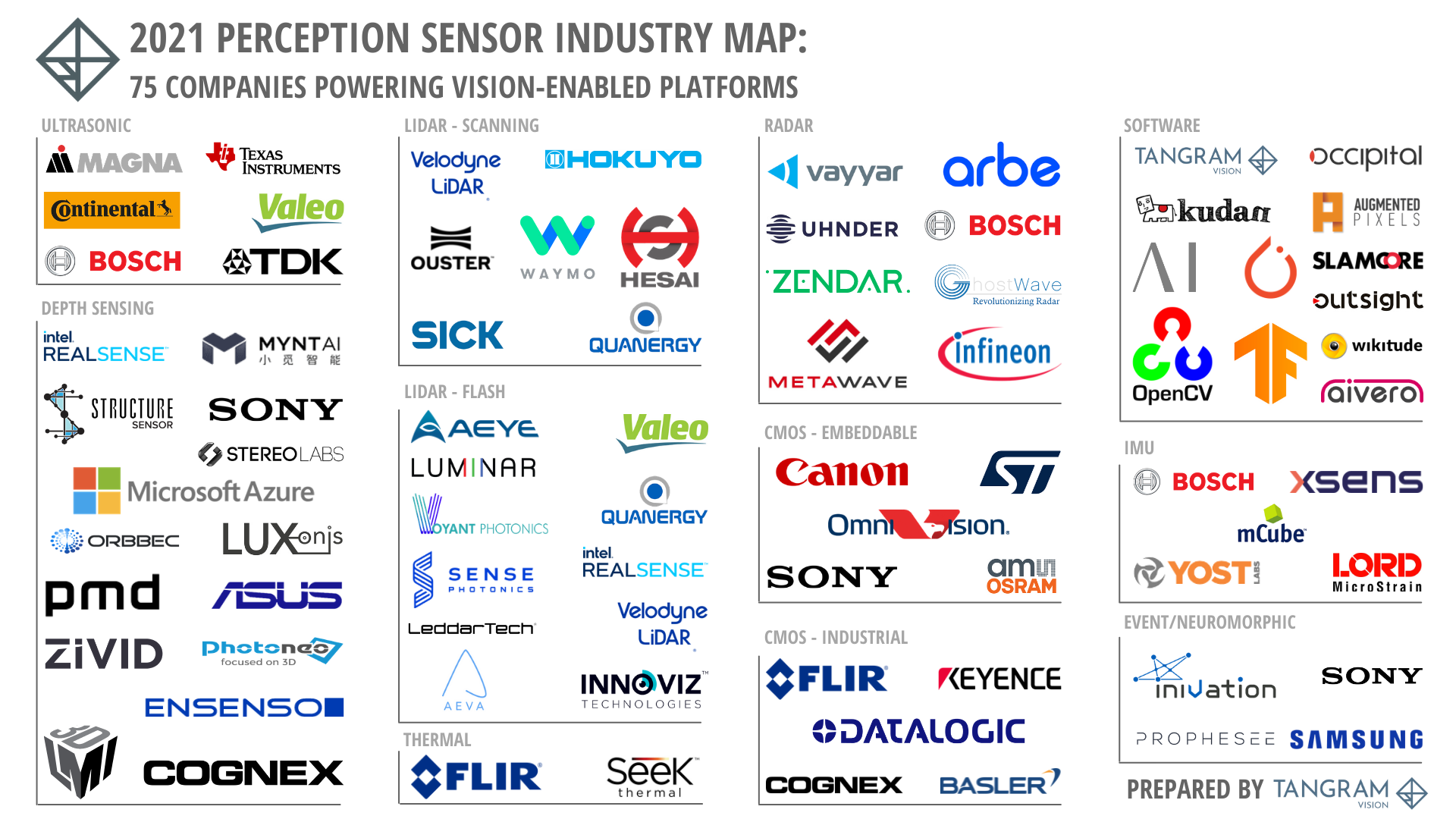
2021感知传感器行业地图
在过去十年中,知情行业已爆炸有新的公司,新技术以及数百万传感器在传统(汽车)到尖端(空间旅行)的行业中的部署。
虽然现任者在某些部分中锁定了多数市场份额,但其他部分已经看到了占主导地位的新参与者的兴起,已成为世界上一些世界各地的供应商'最大的公司。
然而它'清楚它'仍然是感知的早期。新的传感方式和创新的软件平台正在改变感知可能的感知,从而开辟更多新公司的机会,以挑战现有的人和其他初创公司。
我们与这个行业地图的意图是涂上行业立即展示的易于易消化的照片。它显示了关键感知方式中的主要播放器,以及提供最常用于建立感知产品产品的基础设施和库的软件公司。
(注意:如果您想在自己的网站上嵌入2021个感知传感器行业地图,请滚动到此帖子的底部,以进行嵌入代码和归属信息。)
与雷达一样,超声波传感器发出信号和时间信号在反射附近的表面后返回的时间。然而,与雷达不同,超声波使用狭窄的声波(通常在30kHz和240kHz之间)。它通常用于高保真近距离感应,并且通常在汽车应用中发现,如先进的驾驶员辅助系统(ADA)和停车辅助工具。
超声波传感景观由汽车世界的现有人主导。在行业地图中列出的公司是:
深度传感器用于捕获2.5D和3D图像。深度感测内有许多不同的模式,包括结构化光,飞行时间,立体声和有源立体声传感器。此外,可以在来自消费者到工业的一系列应用中找到深度感测。
深度感应景观包括大型现任球员,但也在过去十年中看到了大量的启动活动。代表行业地图的公司是:
LIDAR(光检测和测距)类似于超声波和雷达感测,因为它发出信号和时倍的时间需要多长时间才能从附近的物体或表面上反射并返回传感器。与基于声音的超声波和无线电波的雷达不同,LIDAR使用光。也许没有其他观察部门在过去十年中看到的新公司形成和启动活动是Lidar。自治车辆和无人机市场的出现推动了快速的市场和技术开发,导致创业公司成为现任者(例如,Velodyne和Ouster)。
在行业地图中,我们考虑了激光器的两个主要方式:扫描和闪光。扫描LIDAR单元利用激光发射器和接收器迅速旋转以捕获传感器周围的360°视图。扫描激光雷达的较新的开发也使用MEMS镜子或固态的光束安装,以实现类似的结果,而且具有较少的机械复杂性。 Flash Lidar单元使用固定的激光发射器和接收器,具有宽视野,以捕获大量数据,无需机械部件。
激光乐队市场的快速增长跟踪了对自动车辆和移动机器人的兴趣。然而,AV和机器人市场的预期发展速度较慢,为激光乐队行业创造了涟漪效应,从而产生了许多启动失败和大量的M&一项活动。这一浪潮失败和整合的幸存者正在成为扫描潮汐的占主导地位。一股新的闪光激光乐队公司正在新兴,许多人们们们们们追求了大型汽车合同的ADAS应用。反过来,许多扫描利达的现任者正在推出自己的闪光灯箭,以竞争。
感知系统通常依赖于视觉数据;但是,可视化数据是aln' t始终可用(例如,有雾和unlit方案)。当视觉源失败时,热摄像机可以是提供感官信息的选项。
与上述具有热成像的场景一样,当视觉源失败时,雷达可以提供感觉数据。例如,考虑一种依赖于LIDAR和相机的自主车辆。因为雾遮挡了任何视觉参考,所以AV Won' T能够运作。然而,随着雷达,它可以。自1999年首次推出其Distronemate Adaptive Cruise Control系统以来,雷达已经有效地部署在汽车环境中。
最无处不在的感知方式是CMOS相机。 CMOS相机使用在手机,数码相机,网络凸轮和大多数其他配备相机设备中的相同成像技术。在那里有一个巨大的多样化配置,跨越分辨率,动态范围,彩色滤波,视野等。
在感知应用中,CMOS相机可以彼此使用,或者与其他传感方式一起使用,以实现高级功能。例如,单个CMOS相机可以与机器学习库配对,以便为箱拾取机器人执行分类任务。两个CMOS相机可用于立体配置,为机器人提供深度感测,甚至是AV上的自适应巡航控制系统。 CMOS相机通常与IMU配对,以实现机器人平台的视觉惯性导航。换句话说,感知系统几乎总是包括CMOS相机。
根据系统设计,CMOS相机可以直接嵌入设备或外部附加。前者对于移动机器人和自治车辆很常见,而后者经常发现工业机器人的机器视觉应用。
虽然有数百个CMOS组件和模块供应商,我们选择在感知世界中包含最重要的参与者。
另一种非视觉感应模态,IMU(AKA惯性测量单元)感测动力学运动。单独拍摄,此信息只能提供对空间随机运动的看法。在与CMOS相机或深度传感器如CMOS相机或深度传感器这样的视觉传感器中,视觉惯性传感器阵列可以提供高度精确的位置和移动数据。
在过去的十年中,感知世界涉及神经形式摄像机的兴趣(也称为#34;事件相机")。这些相机的工作原理完全不同于其他相机。这些相机而不是捕获和发送整个帧和#39;这些相机,这些相机以像素为基础上发送数据,并且仅适用于发生改变的那些像素。结果,它们可以以更高的速度运行,并且还可以传输更小的数据。然而,它们仍然难以在尺度上来源,昂贵。迄今为止,只有一个消费者应用程序的应用程序,并不是成功。时间将判断这些实验相机是否逃离实验室并成为现实世界感知系统的正规部分。
感知系统不仅仅是传感器;它也是用该传感器数据做点什么所需的软件。传感器软件可以在堆栈中的较低级别运行 - 例如,Tangram Vision' S软件可确保所有传感器都能最佳地运行并传输可靠的数据。它还可以在应用程序级别运行 - 一个示例将是使用Slamcore' S SLAM SDK为仓库机器人提供导航系统。
在感知软件生态系统中,在过去十年中,血液供应商之间的激烈竞争。这是通过增加对机器人的投资以及虚拟现实和增强现实等XR技术的鼓舞。已经发生了整合,许多团队被旺业公司收购,因为他们计划为AVS和VR凭证等未来的消费产品。
感知行业只是在其成长曲线的开始。传感器模式的最新进步,嵌入式计算和人工智能有更多的新功能,以了解需要感觉传感和操作软件的更多平台。
正如过去十年加的情况一样,持续的整合和新公司的形成将是这个市场的不变性。在Tangram Vision的情况下,我们计划每年一次或两次重新审视和更新此市场地图,以跟上更改的步伐。如果您' ve Get Companions要考虑包含,请在我们和我们举行推文,我们将它们添加到我们的跟踪器中!
只要您提供适当的归属返回朝鲜图愿景,朝鲜图视觉将让您嵌入并显示网站上的2021个感知传感器行业地图。该行业地图的嵌入代码可以在下面复制:
< href =" https://www.tangramvision.com/blog/the-2021-perception-sensor-industry-map"标题=" 2021感知传感器行业地图">>>>>> htt; htt; https://uploads-ssl.webflow.com/5fff85e7332ae877a9e15ce/60920bb2b62757c8e94fd6a4_pmm.png"宽度=" 100%" style =" max-width:850px;" Alt =" 2021感知传感器行业地图">< / a>< / a>< s; ht; href =" https://www.tangramvision.com"提供;目标=" _blank">坦文图视觉< / a>