了解间接飞行时间深度感应
现在你有机会阅读间接飞行时间(TOF)帖子的介绍,让我们深入了解微软实施飞行时间深度感应的机制,以及一对夫妇它提供的功能优势。
回顾,“飞行时间”是指在物体上发光并测量反弹和返回的时间需要多长时间,然后使用光速将时间测量转换为距离,使我们成为物体的形状和位置它的周围环境。
在实践中,我们不使用实际的往返时间 - 获得毫米精度,我们需要为每个像素进行PicoSecond StopWatch电路!相反,我们采取“间接”方法,在那里我们发光,用周期性或“调制”模式,然后计算返回测量的换档。
图2.作为时间经过的调制信号能量的曲线,包括传输和接收,以及相移和距离之间的数学关系。
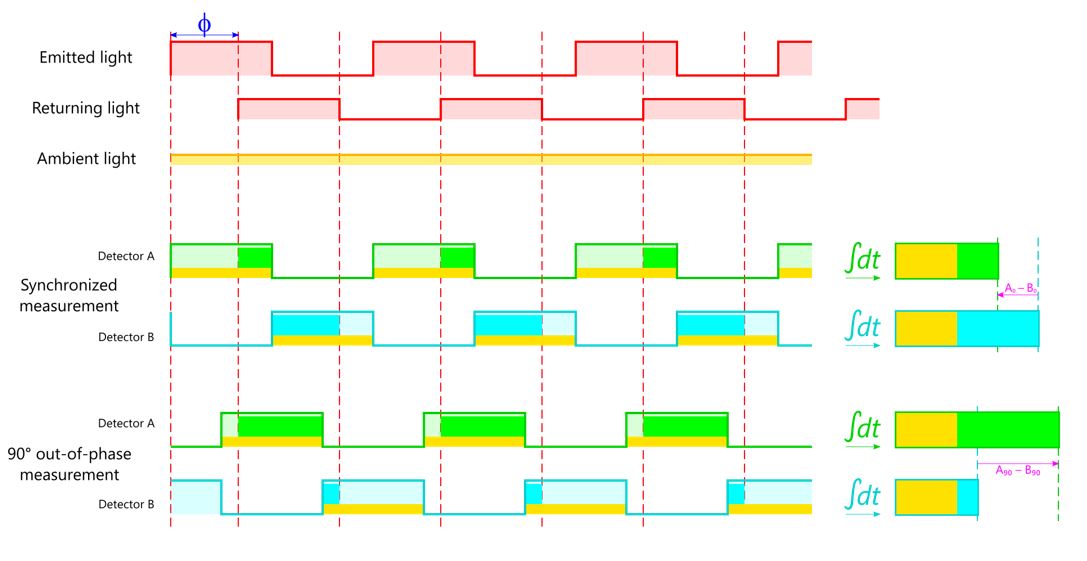
我们如何衡量这一阶段班次?在硅层处,Microsoft ToF传感器中的每个像素由两个检测器或“井”组成,该探测器或“孔”接收光子并将它们转换为电荷。每个孔可以通过传感器控制电路打开或关闭。如果我们将每个孔打开一个调制周期的一半 - 与发射器同步,并且侧面b完全相同 - 然后返回光子将在两个探测器之间分开,但至少有一个井总是准备好抓住他们。基于在探测器A与检测器B中累积的光子的比例,我们可以计算返回信号的偏移。 (我们等待调制周期重复几次以累积充电 - 这被称为“集成时间”,就像彩色相机上的快门速度一样。)
图3A。动画显示同步发射器传感器操作。调制光在右侧的右侧离开发射器,击中左侧的目标,并在中间右侧返回传感器中的某个像素。当发射器处于活动状态时,检测器A(以绿色为单位),并且在循环的非活动部分期间检测器B(在青色)打开。由于相移,返回光子不一定会同步到达。
图3B。在同一场景中的2D斑点随着时间的推移。两个探测器之间的累积电荷的差异将是该像素的“输出”。
但是,我们不能停止这里。如果场景中出现第二个对象,则在一个距离处,使其具有相同的相移,但相反的方向,会发生什么?像素中的累积电荷的分裂就像之前一样,但我们没有办法知道探测器A在返回结束时被收取而不是开始。这意味着我们的测量是模棱两可的。
图4.与上述相同的场景,但与一个假设的第二个目标形成鲜明对比,这是一个大约三分之一的调制时间。我们的(A - B)输出没有改变......
有几种方法可以消除歧义。最常见的方法是立即重复测量,但将传感器推出相位,填充返回波的图片。在该示例中,我们在相对于光源调制传感器90度,改变像素中电荷累加器的开闭图案:
图5.原始方案中的另一对测量添加了可用于消除歧义的信息。
看到返回的光线“将”自身恢复为同步和90度井,我们可以使用复数来重建原始相移,丢弃错误的第二次解决方案。这种复杂的总和使我们两个相移(来自真实轴的角度)我们最初在返回的光线之后和亮度的亮度(作为复数的大小)。从这种亮度计算,我们可以提取对象反射率,或在红外线中的场景的单色图像提取。
现在考虑来自我们相机的调制光不是场景中唯一的光的情况。对于其他来源(如Sun)是常见的,以提供“环境”光足够强,可以在我们的测量中出现。这具有稀释效果,每当打开时将额外的光子放入我们的探测器上。
由于这种额外的光通常是未经调配的,因此它将影响两个探测器。然而,我们的相移测量只取决于两者之间的差异,这意味着我们可以在不引入系统偏压的情况下容忍大量环境光线!不仅如此,我们不必动态定制我们的快门速度,除非我们观察光线,如此高,像素在暴露期间完全填充充电孔。这些差异测量的这些好处转化了很多潜在挑战的情景,进入即插即用简单。
图7.环境光能量达到每个检测器测量的相同偏移量,留下不受影响的差异。
现在,我讨厌透明我们到目前为止的阳光明媚的概述,但重要的是要注意间接的飞行时间系统并非没有其错误来源。环境光可能不会通过调制匹配而导致干扰,但它仍然会增加其自身的变化或“噪声”,或“噪声”。系统本身还有噪音 - 像素可能更强烈或弱到相同的光量;光源可以经历时间或强度波动。如果环境光开始填充像素,则压缩两个井中需要彼此区分的空间,这加剧了任何噪声贡献的效果。我们无法完全避免这种情况,但要减少它,我们从大气吸收带中选择光泽的波长,然后添加传感器带通滤波器,以帮助屏幕光子我们没有产生自己。
总之,即使在这种基本形式的情况下,调制光作为间接飞行时间测量的差异响应会给桌面带来很多:即使在这种基本形式中,即使在存在额外的光线下,鲁棒精度也在额外的光线下,额外的环境知识,额外的表现测量流,例如反射率和单色IR成像。在未来的帖子中,我们将介绍我们的TOF传感器的更多好处以及我们在基本间接TOF机制上所做的改进。