在1.43公里的景观非景观成像
由J. B. Pendry,伦敦,伦敦,英国的宗教学院和2021年2月1日批准(2020年12月3日收到的审查)
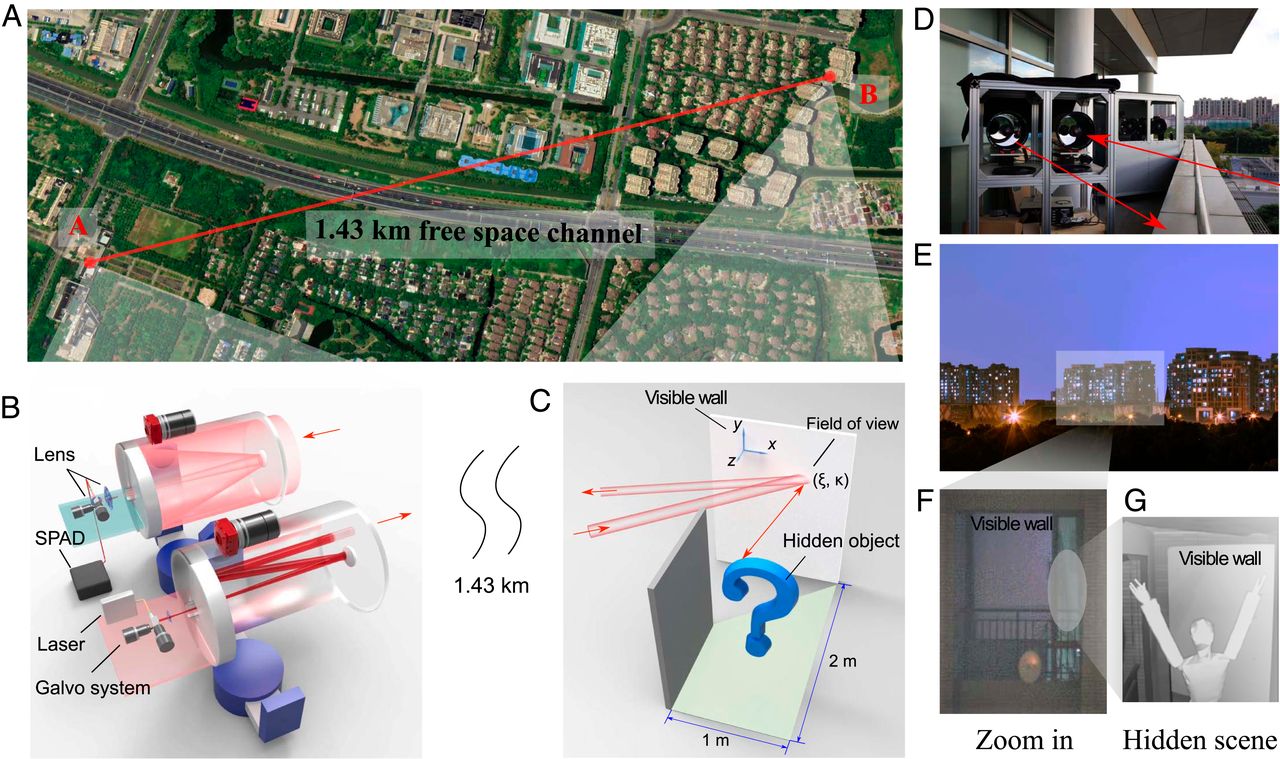
非视线(NLOS)成像具有能够从间接光路中重建隐藏的物体,在周围环境中多次散射,这对各种应用具有相当大的兴趣。然而,传统成像涉及直接视线灯传输以恢复可见物体,NLOS成像旨在从间接光路重建多次的间接光路,通常使用在散射时编码的信息来重建。光子。尽管最近进步,但NLOS成像仍处于短距离的实现,受重损失的限制和由于多个漫反射而导致的空间混合。在这里,实验和概念创新都会产生硬件和软件解决方案,以提高从仪表到公里范围的NLO成像的支座距离,这大约比以前的实验长三个数量级。在硬件中,我们在基于双望远镜共聚焦光学设计的近红外波长开发了高效率,低噪声NLOS成像系统。在软件中,我们采用凸优化器,配备了使用三维矩阵表达的量身定制的空间颞内核,以减轻空间 - 时间扩大在长距离的效果。这些,这些可以在1.43公里的距离上显示我们的NLO成像和实时跟踪隐藏物体。结果将开放地场地,以开发NLOS成像技术和相关申请到现实世界的条件。
作者贡献:F.x.,和J.-W.P.设计研究; C.W.,J.L.,X.H.和F.x.进行研究; C.W.,J.L.,X.H.,Z.-P.L.和F.x.分析数据; z.-p.l.,c.y.y.,J.-t.y.,J.Z.,Q.Z.,X.D.,V.K.G.,X.D.,v.k.g.,以及J.-W.P.贡献了新的试剂/分析工具;和v.k.g.,f.x.和J.-W.P.写了这篇论文。
支持本研究结果的所有数据和处理代码都已存入GitHub(https://github.com/quantum-inspired-lidar/nlos_imaging_over_1.43km)。
查看全文