新的超材料融合了磁记忆和物理变化
对于诸如机器人技术之类的应用,通常在控制机器人身体的处理器与实际控制该身体的物理变化的致动器之间进行明确的分工。但是今天发布的一篇新论文使用磁性开关模糊了两者之间的界限,这种方式既可以存储代表硬件状态的位,又可以改变硬件的物理构造。本质上,它合并了内存和物理更改。
这个特定的实现似乎并不是特别有用-它太大了,无法成为一种实用的内存形式,而且物理变化相当有限。但是这个概念很有趣,有可能更擅长创造性思维的人可以找到修改此概念以创建有用设备的方法。
通常将超材料定义为一种结构化的材料,使其具有在其原料的大量混合物中无法发现的特性。然而,对该定义的广泛阅读将意味着汽车是一种超材料,这使得该定义几乎毫无意义。位于瑞士洛桑联邦理工学院的新设备背后的研究人员声称,他们的创作是一种超材料,但它相当大(一侧约三厘米长的立方体),并且有许多截然不同的部分。我倾向于称其为设备而不是材料,并在这里使用该术语。
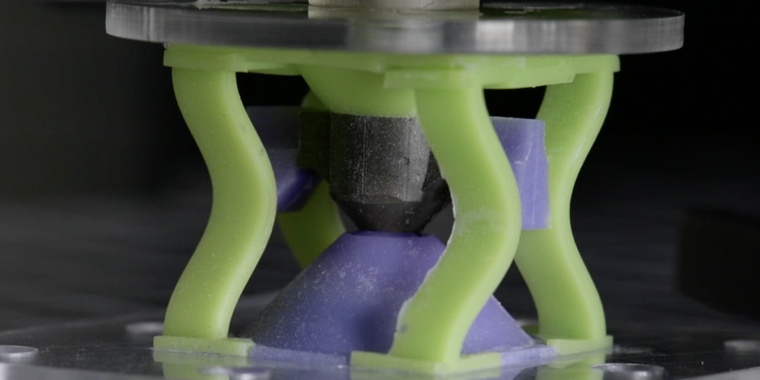
那么什么是设备?更改其配置的部件是一个平台,该平台由一组向内弯曲的四个支腿支撑(下图中的v和iii)。通过记录将平台向下推所需的力来读取系统的两种不同状态。通过在腿部弯曲之间推动楔子(iv),将其推向外侧,并通过将楔子向后滑出再次下降,来增加所需的力。楔块间接连接到在两个稳定状态(i)之间弹出的柔性基座上,有点像可旋转罐盖的顶部弹出,表明罐已被打开。
整个过程由第二部分控制,第二部分将柔性基座连接到楔块。在该装置中,它是由一种聚合物制成,该聚合物中嵌入了磁性颗粒。这允许使用外部磁场控制设备的状态。向上拉动中央磁性组件,然后底座向上弹出,从而推动两腿之间的楔形,并增加使设备变形所需的力。向后推磁性硬件,楔块掉落,并且向下推平台所需的力随之下降。
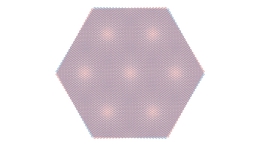
研究人员建立了这些设备的六乘六阵列,并表明可以使用位于其上方和下方的其他磁性设备分别对这些设备进行寻址。该过程不是很快;设备需要大约一秒钟的时间来更改状态,并且在每次更改之后,系统必须冷却四秒钟。但是设备可以来回切换超过1000次而不会损失性能。
六乘六的阵列允许在单个设备中进行37种不同的开关状态组合,研究人员测试了在每种状态下使平台变平所需的力。正如预期的那样,该力根据配置而变化,表明设备可以共同更改它们所属于的硬件的属性。
但是,除了通过力测量设备的状态外,研究人员发现他们还可以读取其磁性状态,就像硬盘上的位一样。由于设备磁性部件位置的变化,他们在硬件表面进行测量时发现其磁性质有五倍的差异。
因此,总的来说,设备网格可以进行三个不同的测量:它们所支撑的表面的变形特性的整体变化,使单个元素变形所需的力的差异以及单个磁特性的变化元素。
总的来说,所有这些都很好。但是,它显然没有用。这部分是由于其尺寸,但也部分是因为没有明显的立即需要具有微调可压缩性的表面或磁性读取零件状态的替代方法只记得他们是如何设置的。但是研究人员说,应该有各种各样的方法来缩小设备尺寸。他们认为,既然已经证明了这一概念,就可以通过许多方式对其进行扩展。因此,我们必须保留对效用的判断,直到我们看到其他研究团体对该概念做了什么为止。