麻省理工学院制造能“看得见摸得着”物体的机械手
研究人员已经开发出一种机器人手,能够通过“感应”物体来捡起像脆片一样易碎的物体。
麻省理工学院计算机科学和人工智能实验室制造的两种新工具在新兴的软机器人领域取得了突破--新一代机器人使用柔软的柔性材料,而不是传统的刚性设备。。
这些类型的软机器人通常从活的有机体中汲取灵感,并在其多功能方面提供了许多好处。他们能够比僵硬的同行更精细地操作,但到目前为止,他们还缺乏感知他们正在与之互动的项目的能力。
为了克服这一点,研究人员为他们的机器人配备了各种传感器、摄像头和软件,使它们能够“看到并分类”一系列物体。
麻省理工学院教授兼CSAIL主任丹妮拉·罗斯(Daniela Rus)说:“我们希望通过感受世界来看世界。”
“柔软的机器手有感应化的皮肤,可以拿起一系列的物体,从易碎的(如薯片)到重的(如奶瓶),不一而足。”
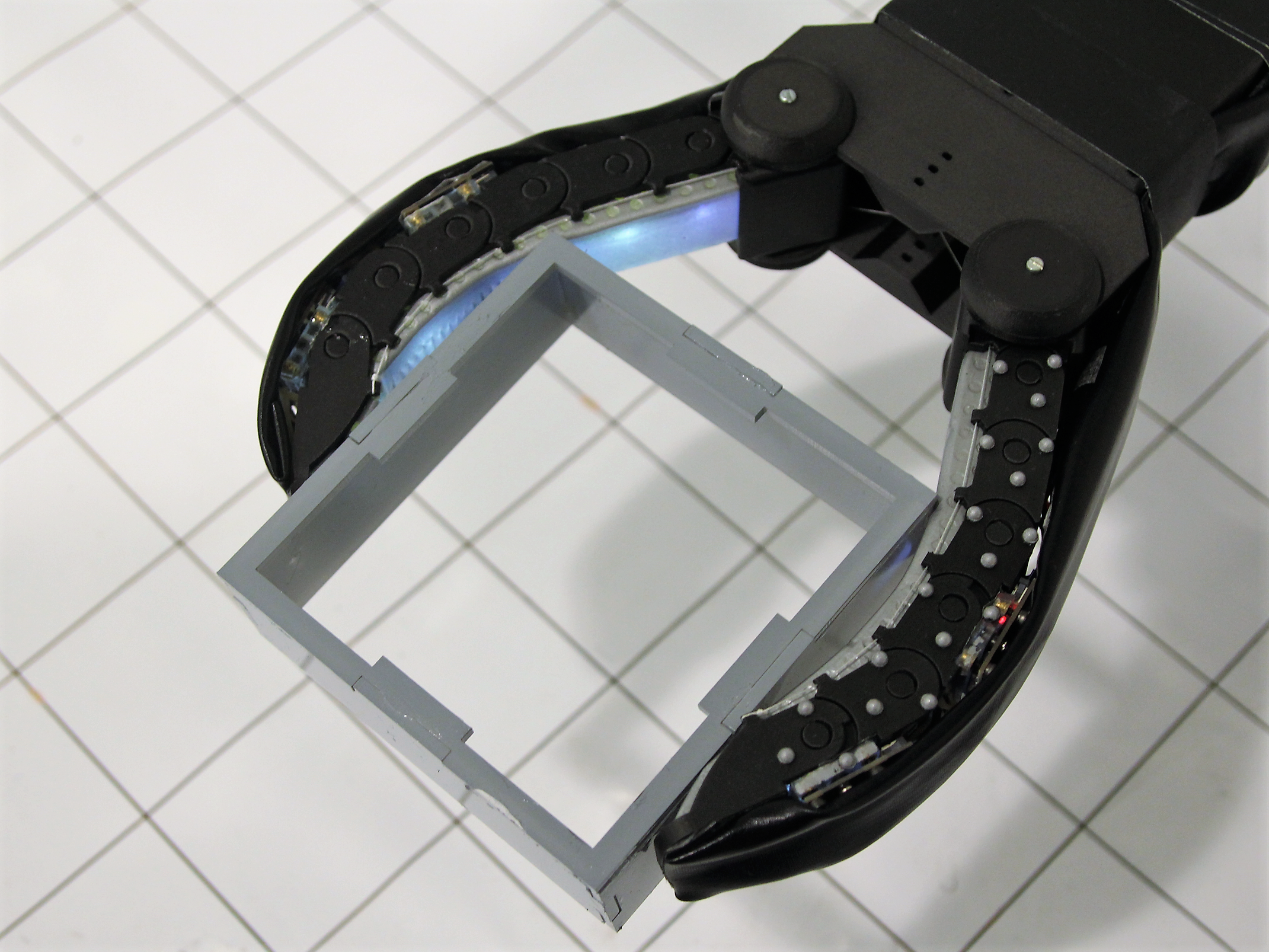
第一个机器人是在2019年麻省理工学院和哈佛大学的研究基础上建造的,当时一个团队开发了一个锥形的机器人抓取器。它的工作原理是以类似于金星捕蝇器的方式塌陷在物体上,使其能够捡起一系列形状笨拙的物体,最高可达其重量的100倍。
通过添加触觉传感器,机器人能够理解它捡到的是什么,并相应地调整施加的压力。在实验中使用的10个物体中,传感器能够以90%以上的准确率识别它们。
麻省理工学院的乔西·休斯(Josie Hughes)是一篇详细介绍这些传感器的论文的主要作者,她说:“与许多其他软触觉传感器不同,我们的传感器可以快速制造,改装成抓手,并显示出灵敏度和可靠性。”
我们希望他们提供一种新的软测量方法,可以应用于制造环境中的广泛不同应用,如包装和起重。“。
第二个机器人使用了一个创新的“GelFlex”手指,它使用肌腱驱动的机构和一系列传感器来提供更细微的、更像人类的感官。
该团队现在希望微调传感算法,并引入更复杂的手指配置,如扭转。
这两个机器人都在两篇论文中进行了详细介绍,这两篇论文将在2020年国际机器人和自动化会议上进行虚拟展示。
输入您的电子邮件地址请输入电子邮件地址电子邮件地址无效填写此字段电子邮件地址无效电子邮件已存在。登录以更新您的时事通讯首选项,我希望每周通过电子邮件接收生活方式世界上最好的功能和趋势。
您可能不同意我们的观点,也可能不同意其他用户的观点,但请恭敬地回应。
咒骂、人身辱骂、种族主义、性别歧视、仇视同性恋和其他歧视性或煽动性的语言是不能接受的。
您可能不同意我们的观点,也可能不同意其他用户的观点,但请恭敬地回应。
咒骂、人身辱骂、种族主义、性别歧视、仇视同性恋和其他歧视性或煽动性的语言是不能接受的。
想要讨论现实世界的问题,参与最引人入胜的讨论,听取记者的意见吗?立即开始您的独立高级订阅。
已经注册了?登入。
独立高级评论可以由我们会员计划的成员发布,独立高级。它允许我们参与度最高的读者辩论重大问题,分享他们自己的经验,讨论现实世界的解决方案,等等。我们的记者将尝试回应,在他们可能的情况下加入这些帖子,以创造一次真正的独立溢价会议。关于所有主题的最有洞察力的评论将每天发表在专门的文章中。您也可以选择在有人回复您的评论时通过电子邮件发送。
对于那些没有订阅独立高级的人,现有的开放评论线程将继续存在。由于这个评论社区的巨大规模,我们不能对每个帖子给予同等程度的关注,但出于公开辩论的利益,我们保留了这一区域。请继续尊重所有评论者,并进行建设性的辩论。